
多周波RTKモジュール u-blox ZED-X20Pの設定方法
ZED-X20Pを使用する際の設定方法を説明します。
ZED-X20Pは弊社のネットショップでも「ZED-X20P RTKシステム開発用ボードX20PX1」として販売していますのでご利用下さい。

設定はu-bloxのアプリu-center2を使って行います。
ZED-X20PはRTKの基準局としても移動局としても使用できますが、現在のu-center2のバージョンではNTRIPキャスタに基準局データをアップロードできません。
基準局として使う場合はRTKLIBの STRSVRを使う方法を説明します。
1.u-center2のインストール
ZED-X20Pの設定にはu-bloxのアプリu-center2が必要です。
u-bloxのサイトからダウンロードしてインストールします。
このダウンロードサイトではu-centerとu-center2がありますが、u-center2をインストールして下さい。
u-center2のマニュアルは英語ですので、他の言語で表示する場合はブラウザの翻訳機能を使って下さい。
インストール後、u-center2を起動すると、”Log in with browser”ボタンが表示され、クリックすると、ブラウザにu-bloxのサイトへのログインページが表示されます。
すでにu-bloxのユーザ登録をしている場合は登録した時の手順でログインできますが、登録していない場合は2段階認証によるログインとなります。
u-bloxのデフォルトの2段階認証はスマホが必要で、スマホにSalesforce Authenticatorをインストールしておかねばなりません。
Salesforce Authenticationをインストール後、プッシュ通知を有効にしておいて下さい。
正常にログインできるとu-center2が使えるようになります。
どうしてもu-bloxにログインできない場合、u-center2が使えませんので、u-centerをご使用下さい。
u-centerを使った時の設定は「2周波RTKモジュール u-blox ZED-F9P の設定方法」をご覧下さい。
2.ZED-X20Pの接続
現在、ZED-X20Pが搭載された開発用ボードは何種類か販売されていますが、USBコネクタを通してZED-X20Pと通信するインターフェースには2種類あります。
次の表はその2種類の区別を表しています。
弊社X20PX1のコネクタ | 通信するZED-X20Pのインターフェース | 説明 |
Type-C | UART1 | ファームウェアの書き換え等、ZED-X20Pの全ての機能にアクセスできます。 |
マイクロB | USB | ファームウェアの書き換えができない等の制約があります。 |
弊社のX20PX1やu-bloxのEVK-X20Pはどちらのインターフェースでもアクセスできますが、製品によってはZED-X20PのUSBインターフェースでしか通信できないものがあります。
USBインターフェースの場合、どういう問題が起きるかは「ZED-X20Pテストレポート」をご覧下さい。
以下の内容はUART1インターフェースを使った場合の内容となります。
パソコンとの接続
ZED-X20PのUSB端子をパソコンに接続します。正常にUSBデバイスとして認識されると、シリアルポート番号が割り当てられます。
シリアルポート番号はデバイスマネージャで確認できます。次の画像は正常に認識された時のデバイスマネージャの画面で、2個のZED-X20Pを接続した場合です。このCOM3,COM4がポート番号でこの番号はそれぞれ違ってきますのでメモしておきます。

このポート番号の前に表示されている 「USB Serial Port」 の名称は、パソコンにより、別の名称が表示される場合があります。
別の名称でも、コネクタを抜き差しするタイミングに合わせて表示が変わるポートがあればそれが該当するCOMポートとなります。
u-center2の画面
u-center2を起動すると次の画面が表示されます。
左端にメニューバーがあり、4つのアイコンが並んでいます。
メニューバーの右側にはConsolesタブとViewsタブがあり、ZED-X20Pからのデータをテキストやグラフィックで表示できます。
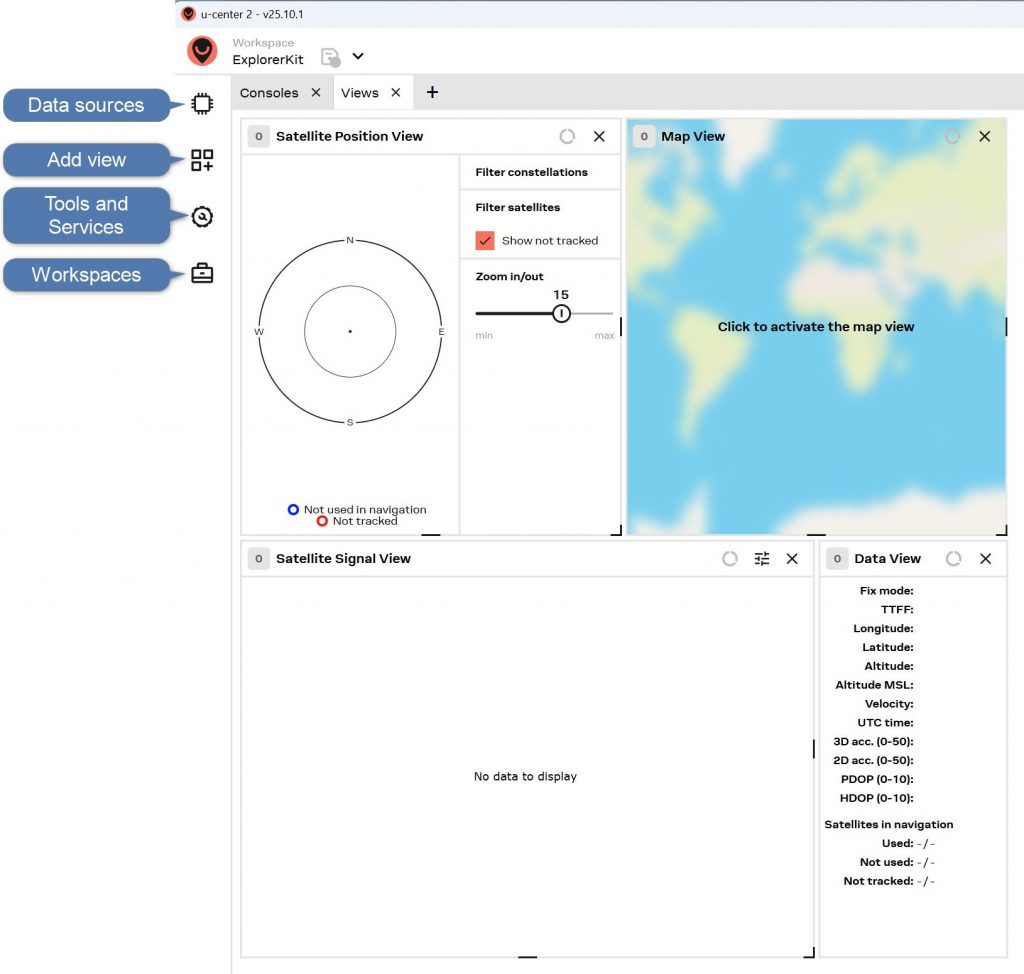
メニューバーの各アイコンの機能は次のとおりです。
| Data sources | 受信するCOMポートの設定や再生するログファイルを指定します。 |
| Add view | 画面に表示するテキストやグラフィックデータを指定します。 |
| Tools and Services | NTRIPキャスタの指定やファームウェアの更新等を行ないます。 |
| Workspaces | 画面の設定を保存、復元します。 |
通信の開始
次にZED-X20Pとの通信を開始します。
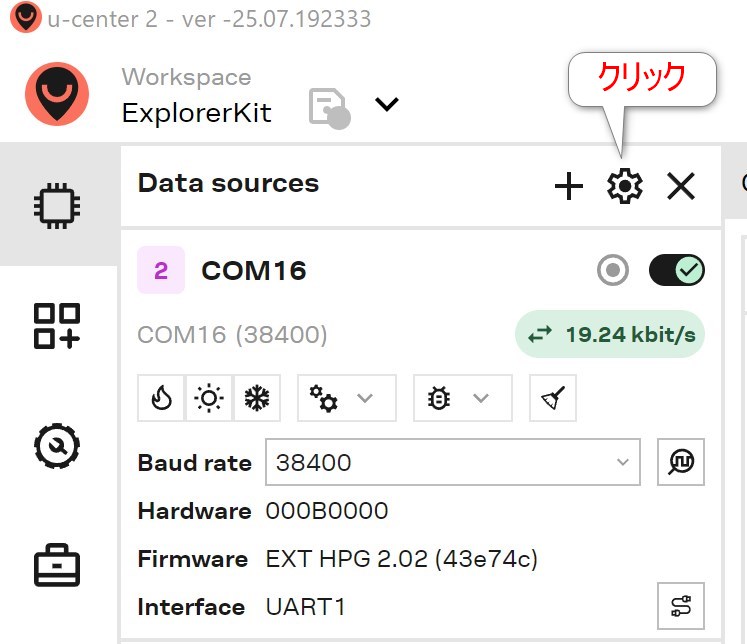
通信の開始はData sourcesアイコン![]() をクリックします。
をクリックします。
次のData Sourcesウィンドウが表示されます。
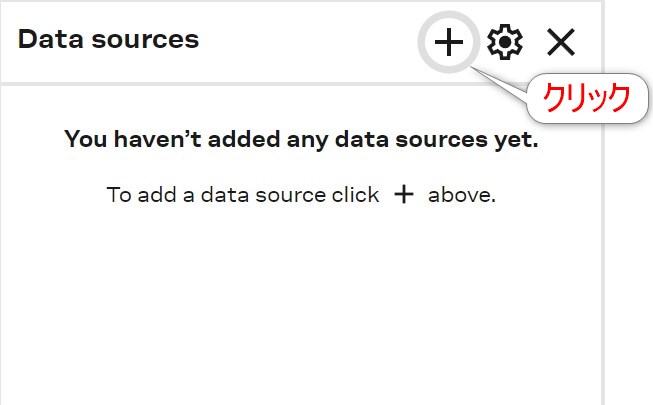
+アイコンをクリックすると次のAdd data sourceウィンドウが表示されます。
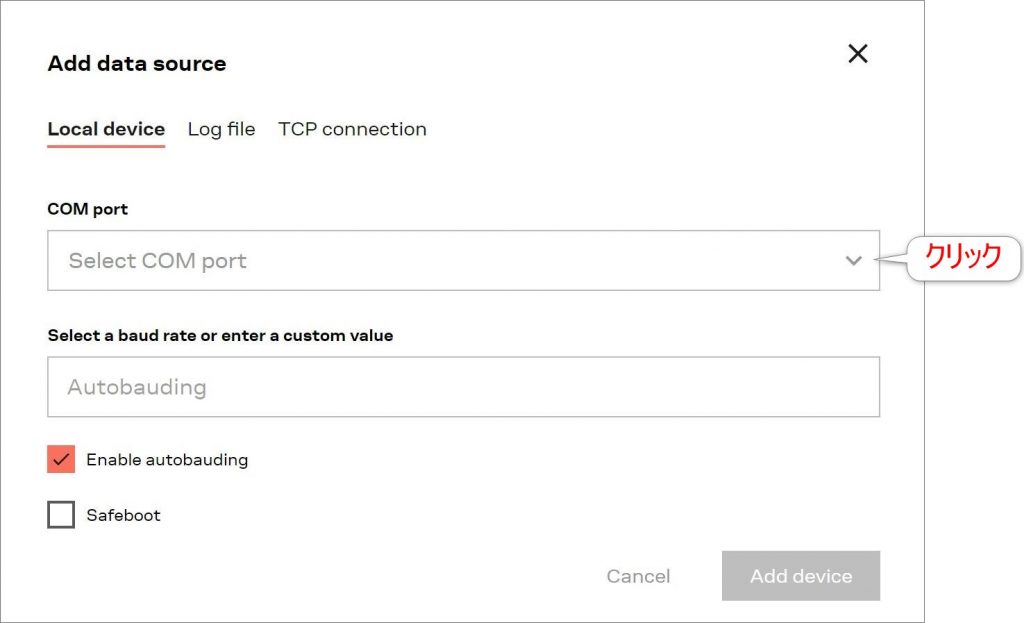
COM portの欄のプルダウンマークをクリックすると使用できるCOMポートが表示されます。
ZED-X20Pが接続されているCOMポートを選択した後、Add deviceボタンを押します。
正常にZED-X20Pと接続されると次の画面のように、緑の色で通信速度が表示され、Firmwareの項目にZED-X20Pのファームウェアのバージョンが表示されます。
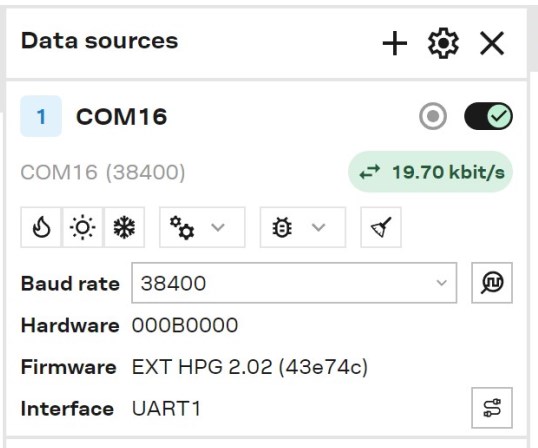
Firmwareのバージョンが表示されない場合、通信ができていませんので、COMポートが正しいかどうか等をご確認下さい。
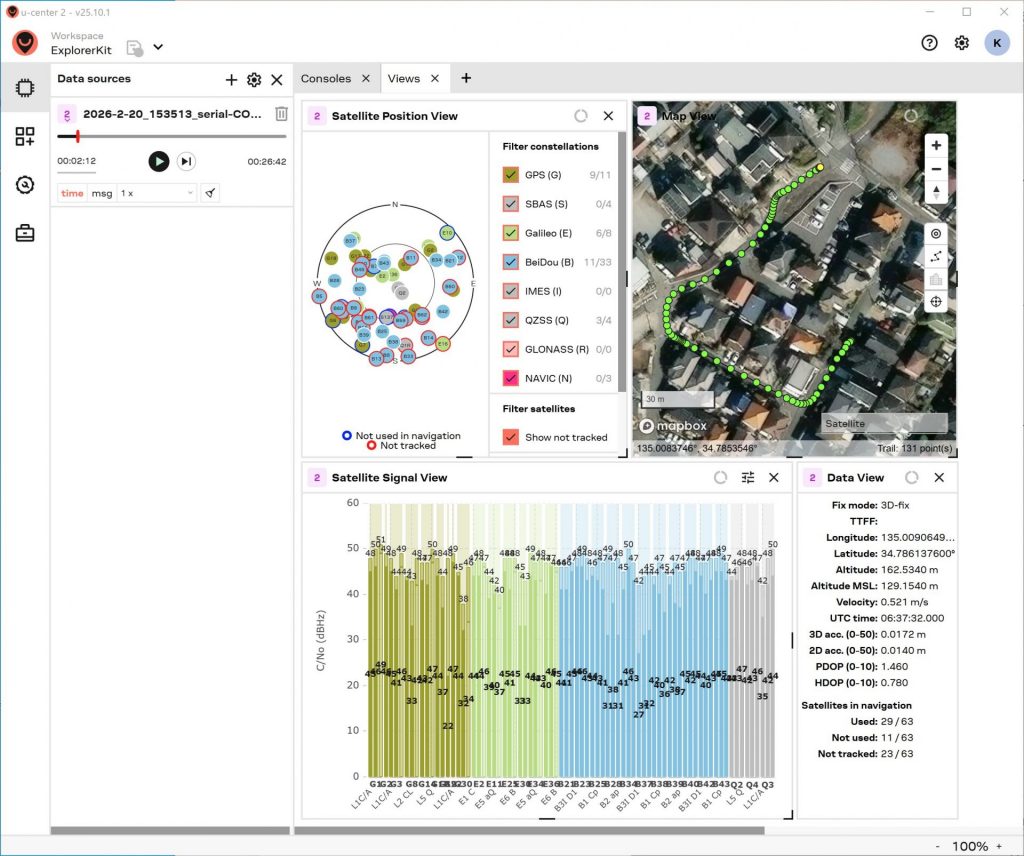
少し待つと次の画面のように各衛星からの受信状況が表示されます。
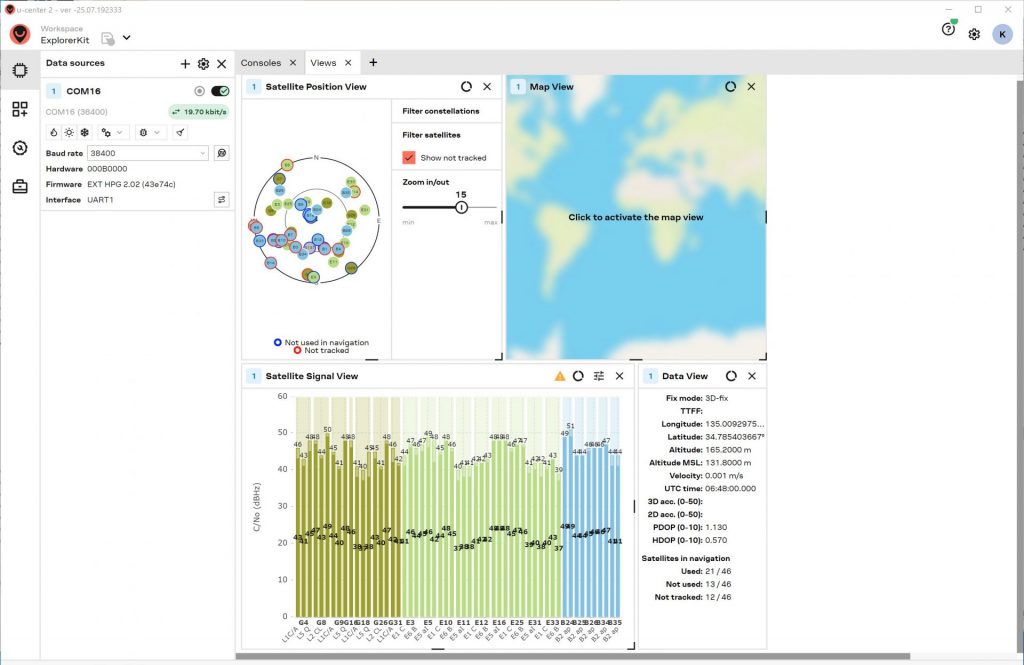
棒グラフは各衛星からの電波の受信レベルを表しています。
この画面に何も表示されない場合はアンテナが接続されていません。殆どの衛星で受信レベル(C/No)が30以下の場合はアンテナの設置場所に問題があります。より空が見渡せる場所に設置して下さい。
各棒グラフの下側のB,E,Gは衛星種別で、それに続く数字は衛星番号です。
衛星種別は B: BeiDou E: Galileo G: GPS N:NAVIC Q:QZSS (R: GLONASS) です。
デフォルトではNAVIC及びQZSSは受信しない設定になっていますが設定で受信できるようになります。
GLONASSは現在受信できません。
各衛星からは複数の周波数帯の電波が送信されていて、棒グラフは周波数帯毎の受信レベルを表しています。
斜めの英数字がその周波数帯を示しています。
ZED-X20PはL1、L2、L5、L6/E6バンドの電波が受信できますので、正常な場合は、GPSに関してはL1、L2、L5が表示され、Galileoに関してはE1、E5、E6が表示されます。
L1、L2だけとか一部しか表示されない場合はアンテナが多周波に対応していない可能性があるのでご確認下さい。
多周波に対応したアンテナは弊社のネットショップ ジオセンスヤフー店 でも扱っていますのでご利用下さい。
Map Viewの画面は当初地図上での位置が表示されませんが、インターネットに接続されていれば、地図画面をクリックすると表示されるようになります。
3.基本的な設定
デフォルトでは日本のQZSSやインドのNAVICなどローカルなGNSSシステムは受信しない設定になっています。
その他、測位レートの設定や基準局としての動作設定など、使用目的に合わせて各種の設定を行う必要があります。
それらの設定を行うにはData Sourcesウィンドウの設定アイコンをクリックします。
次の、Device configurationウィンドウが表示されます。
Categoriesのパネルで、Quick configurationとAdvanced configurationの切り替えができます。
クイック設定
開いた時はQuick configurationのパネルのConstellation configurationが選択されていて、どのGNSSシステムを受信するかの設定画面となっています。
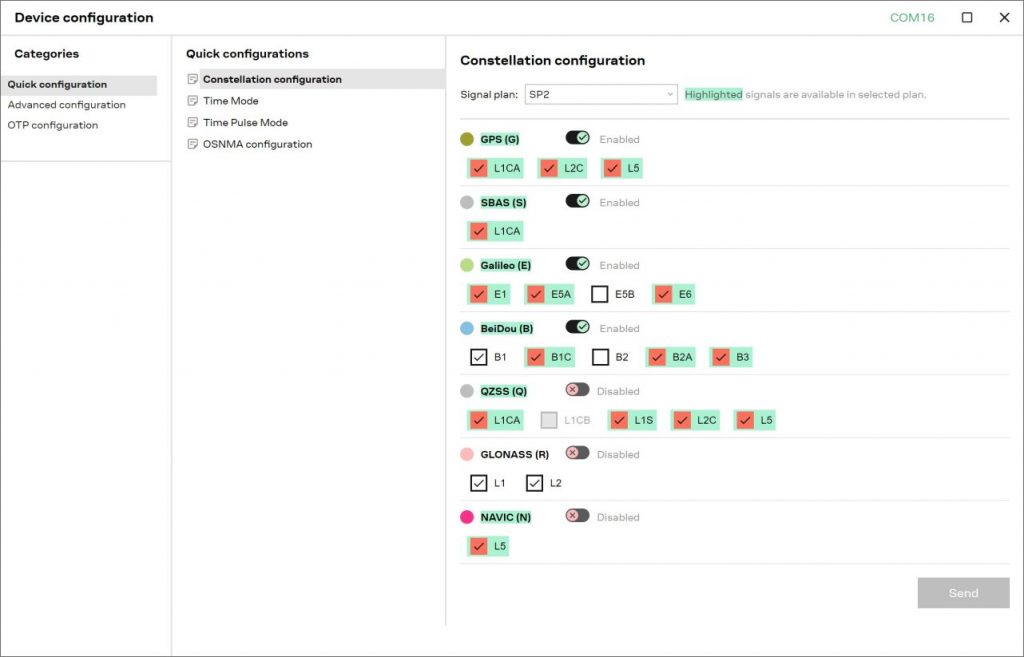
この画面で、QZSSを有効(Enabled)にし、必要に応じてNAVICも有効にします。
設定後、Sendボタンを押します。
少しすると、受信レベルのウィンドウにQZSSが追加されます。
クイック設定ではこの他に基準局として動作させる場合の設定や、タイムパルスの設定などもできます。
測位レートの変更や出力メッセージの設定等は次の詳細設定で行います。
詳細設定
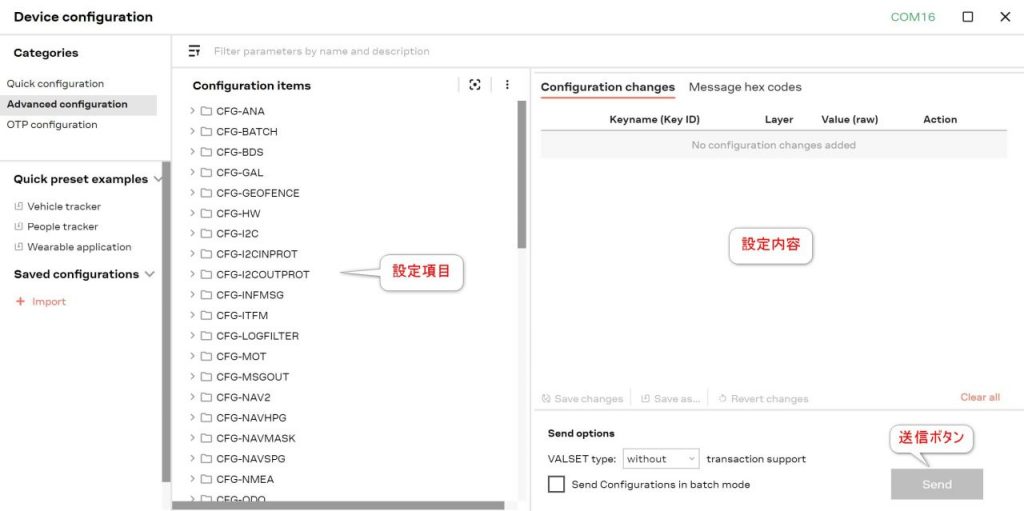
設定画面のCategoriesのパネルでAdvanced configurationをクリックすると次の画面が表示されます。
操作は、設定項目をクリックすると設定内容のパネルに現在の値が表示され、変更後、送信ボタンを押すという手順です。
設定例:ボーレートの変更
ボーレートの既定値は38,400bpsですが、動作条件によっては通信エラーが起きます。
実効ボーレートの欄は正常な場合は緑ですが、通信エラーが起きていると、次の画面のように、オレンジ色に変わります。
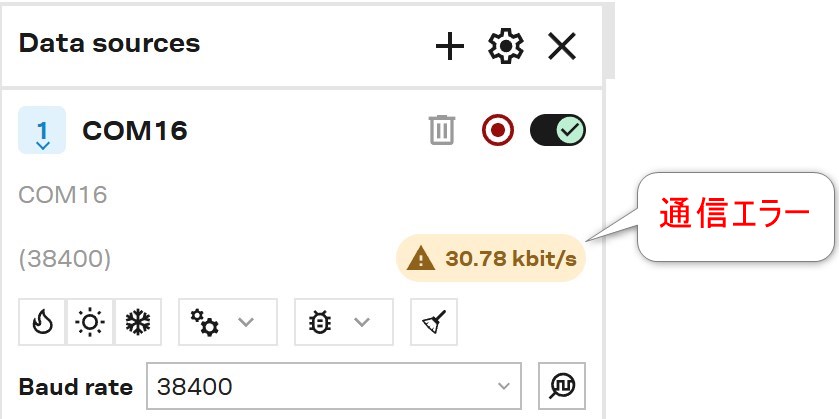
通信エラーが起きている時にボーレートを変更しようとしても変更できない場合があるので、最初にボーレートを変更します。
通常は460,800bps程度に設定しておけばいいですが、測位レートを25Hzで使う場合などでは不足する場合もありますので、条件によってより高速に設定します。
ボーレートの設定はCFG-UART1 という項目をクリックし、表示された属性のBAUDRATEで設定します。
BAUDRATEをクリックすると次の画面のように現在の値が表示されます。
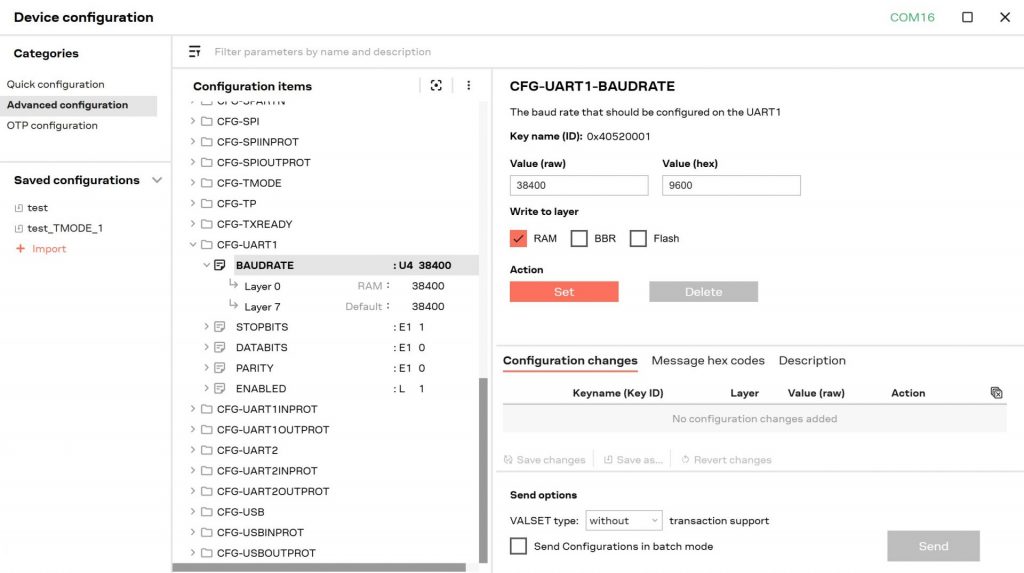
この右側のパネルのValueの欄が現在の値38400で、この値を変更したい値460800にします。
一時的に変更する場合は、Write to layer欄のRAMをチェックし、電源オフ後も変更を維持したい場合はFlashをチェックします。
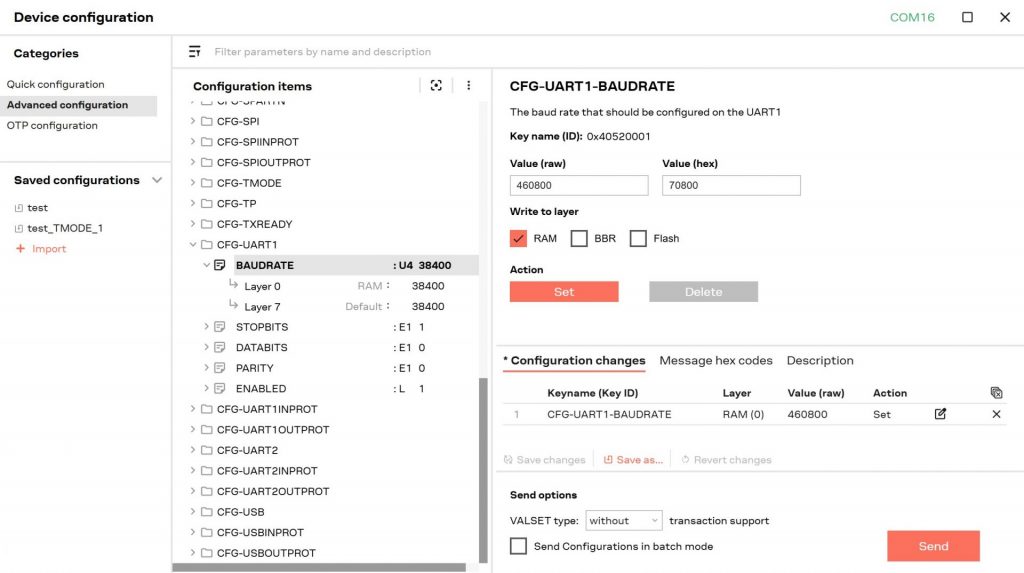
変更後、Setボタンを押すと、次の画面のように変更内容がConfiguration changesのパネルに登録されます。
登録されるとSendボタンが有効になりますので、ボタンを押すと実際に変更されます。
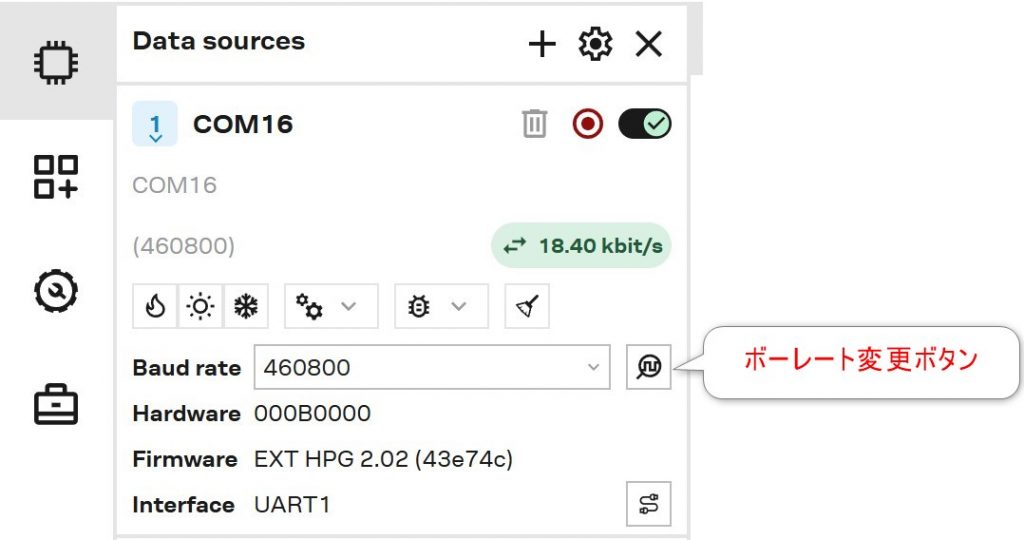
Sendボタンを押した時、Configuration changesの欄に送信結果が表示されます。
正常に送信できた時は緑のチェックマークが表示されますが、エラーの時は次の画面のエラーマークが表示されます。
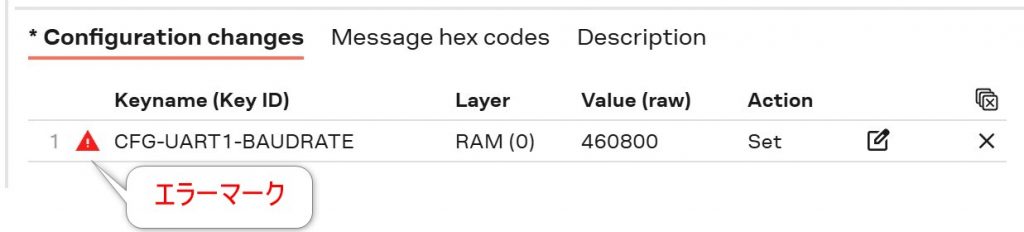
ボーレートを設定した時はこのエラーマークが表示されますが問題ありません。
ボーレートを変更したため、u-center2との通信ができなくなったためで、次の画面のボーレート変更ボタンを押せば新しいボーレートで通信が始まります。
この他に設定できる項目および設定のためのKey NameはZED-X20PのInterface description マニュアルを御覧下さい。
4.移動局としての設定
ZED-X20PをRTKの移動局として使用する場合、特に設定の必要はありません。
ZED-X20PにRTCM形式のRTKデータが送られてくると自動的にRTKでの測位を行います。
測位結果をNMEAセンテンスで利用する場合、必要に応じて次の設定を行って下さい。
高精度出力
何も設定しないと、NMEAセンテンスの位置の精度は水平方向で2cm,高さは10cm程度の分解能で出力されます。
より高精度の値を得たい場合は次の設定を行います。
この設定で、水平方向は約0.1mm、垂直方向は1mmの分解能で出力されます。
CFG-NMEA-HIGHPREC = true
基準局データの取得
RTK測位を行うには基準局データを取得する必要があります。
基準局データは、自前で用意するか、有料/無料のデータ配信サービスを利用するかですが、いずれにしても標準的なデータ配信のプロトコルはNTRIPです。
このNTRIPで基準局データを取得するにはメニューバーのTools and Servicesアイコンをクリックし、次にNTRIP clientをクリックします。
次のNTRIP clientのウィンドウが表示されます。
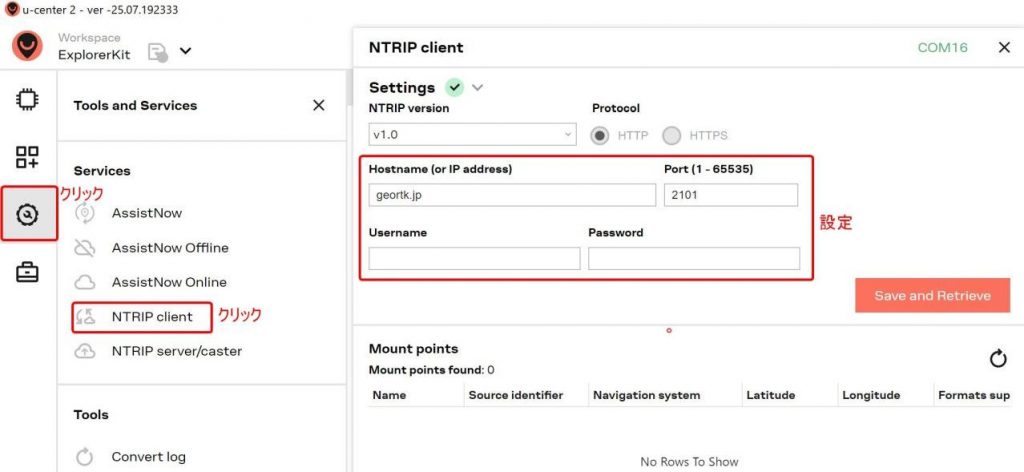
このウィンドウのHostnameにNTRIPキャスタのアドレスを指定し、必要に応じて、Port,Username,Passwordを指定します。
設定後、Save and Retrieveボタンを押します。
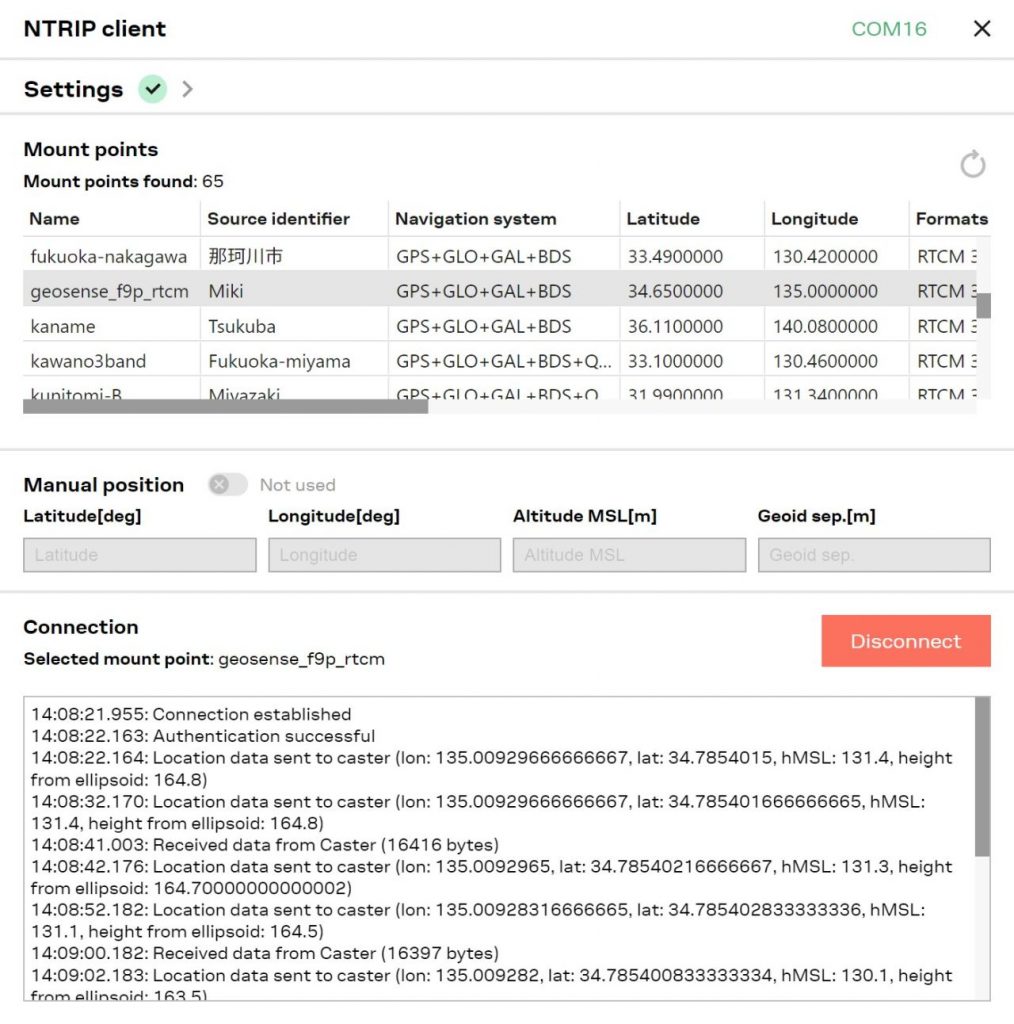
実際にNTRIPキャスタにアクセスし、次の画面のように、利用できるマウントポイントの一覧が表示されます。
表示されたマウントポイントの一覧から利用したいマウントポイントをクリックします。
指定されたマウントポイントへの接続が始まり、接続状況がConnectionパネルに表示されます。
正常に接続され基準局データが送られてくると”Received data from Caster”と表示されます。
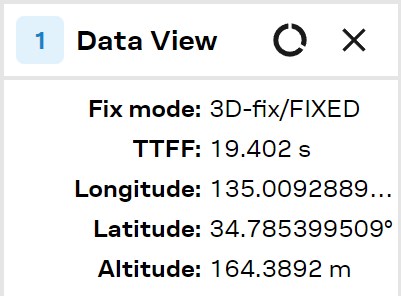
送られてきた基準局データを使って、正常にRTK測位が行なわれると、DataViewのFix modeの欄に"/FIXED"と表示されます。
衛星からの電波の受信状況によっては、"/FLOAT"と表示される時がありますが、RTK測位は正常に行われていますのでNTRIPキャスタとの接続は問題ありません。
3)RTK測位データの利用
RTK測位した高精度の位置データはファイルに保存したり、地図上に表示したりできます。
(1)ログファイルの保存
位置データをログファイルとして保存するにはData sourcesの画面にあるログ保存ボタンをクリックします。

クリックすると次の画面が表示されます。
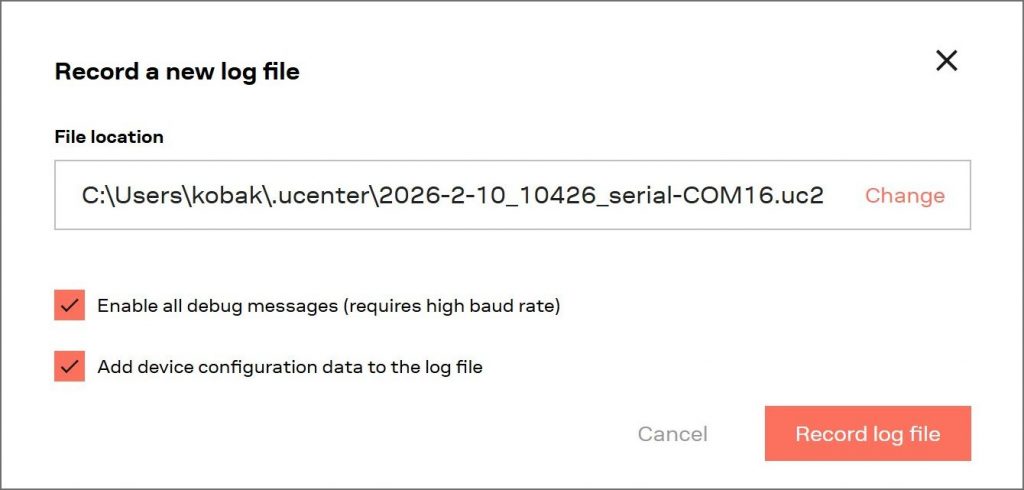
File locationにはデフォルトの保存ディレクトリとファイル名が表示されています。
変更したい場合はChangeをクリックして変更します。
拡張子は.uc2で変更できませんが、従来の.ubxフォーマットのファイルも同時に作成されます。
Enable all debug messageのチェックが入っているとファイル容量が大きくなるので、デバッグ目的以外ではチェックは外します。
変更後、Record log fileをクリックすると保存が開始されます。
同時にログ保存ボタンの円の中が〇から□に変わり、□になったログ保存ボタンを押すと保存が停止されます。
保存したログファイルは再生する事ができ、走行ルートや受信状況を確認できます。
ログファイルにはZED-X20Pから送られてくるデータが保存されますが、拡張子が.uc2のファイルには時刻を表すバイナリデータが含まれます。
そのため、テキスト形式のNMEAセンテンスを受け付けるアプリでは読み込む事ができません。
同時に保存される、拡張子が.ubxのファイルはバイナリデータが付加されませんので、そのようなアプリでも読み込む事ができます。
但し、バージョンが25.10.1のu-center2ではNTRIPキャスタからのバイナリデータも記録されてしまい、RTK測位のデータは読み込む事ができません。
RTK測位のNMEAセンテンスをログとして保存したい場合は従来のu-centerを使う必要があります。
(2)ログファイルの再生
再生するには、Data sourcesの+ボタンを押して表示されるウィンドウで、再生したいファイルを指定します。
次の画面は再生している時の画面で、Data sourcesに表示されている再生ボタンやスクロールバーで表示を制御します。
再生速度は等倍(1x)か倍速(2x)が選択できます。
Viewsの各画面は再生時点の状況が表示されますが、Data ViewのFix ModeはRTK測位に対応していないようで、RTK FloatやRTK Fixであっても3D-fixとしか表示されません。
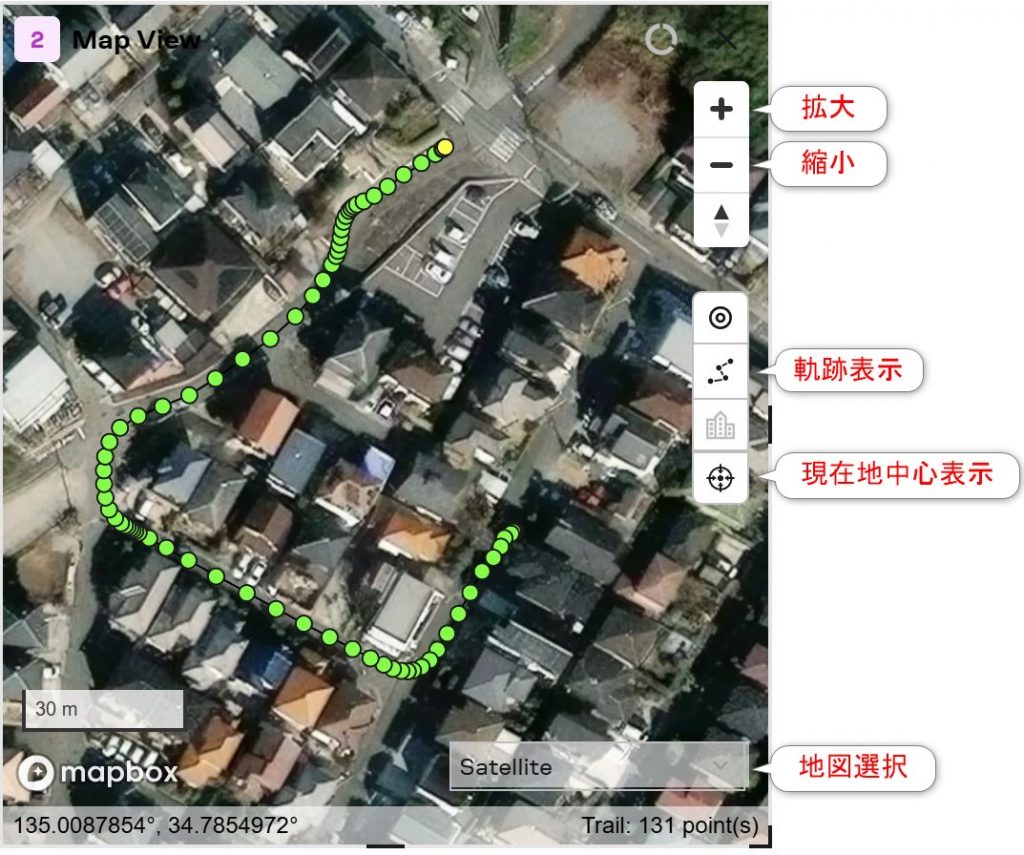
地図画面では右側のボタンで表示方法を切り替えます。
軌跡表示では、現在地は黄色で、以前の位置は、Fix modeにより、3D-fixの時は緑、2D-fixの時は青で表示されます。
Data Viewでの表示と同じく、現在のバージョンではRTK測位のFix modeには対応していないようです。
地図選択では通常の地図、モノクロ(昼夜)、等高線入り、衛星写真の切り替えが出来ます。
5.RTK基準局としての設定
ZED-X20PをRTKの基準局として使用する場合は、RTCMメッセージの出力間隔とアンテナの位置を設定します。
RTCMメッセージの出力間隔
通常、基準局データはRTCM形式で配信しますので、そのメッセージをZED-X20Pが出力するように設定します。
出力するメッセージは次のとおりです。
内容 | RTCMメッセージタイプ番号 | 設定キーの名称 | 値 |
アンテナ位置 | RTCM 1005 | CFG-MSGOUT-RTCM_3X_TYPE1005_UART1 | 1 |
GPS MSM7 | RTCM 1077 | CFG-MSGOUT-RTCM_3X_TYPE1077_UART1 | 1 |
Galileo MSM7 | RTCM 1097 | CFG-MSGOUT-RTCM_3X_TYPE1097_UART1 | 1 |
BeiDou MSM7 | RTCM 1127 | CFG-MSGOUT-RTCM_3X_TYPE1127_UART1 | 1 |
MSMはMultiple Signal Messageの略で、MSMにはタイプ4とタイプ7が設定できますが、通常はタイプ7を設定します。
設定キー名称の"_UART1"はZED-X20PのUART1端子からデータを出力する場合の名称です。
従来のUSBインターフェースで通信している場合は"_USB"に変更し、I2C,SPI,UART2の場合は同様に変更して下さい。
値はデータの出力間隔を秒数で指定します。1の場合は1秒毎、2の場合は2秒毎に出力します。
アンテナ位置
アンテナ位置の緯度経度と高度を設定します。
| 内容 | 設定キーの名称 | 値 |
| 位置モード | CFG-TMODE-MODE | 2-FIXED |
| 位置形式 | CFG-TMODE-POS_TYPE | 1-LLH |
| 緯度(小数点以下7桁まで) | CFG-TMODE-LAT | 緯度(1E-7度単位) |
| 緯度(小数点以下8,9桁部分) | CFG-TMODE-LAT_HP | 緯度(1E-9度単位) |
| 経度(小数点以下7桁まで) | CFG-TMODE-LON | 経度(1E-7度単位) |
| 経度(小数点以下8,9桁部分) | CFG-TMODE-LON_HP | 経度(1E-9度単位) |
| 高度(cmまで) | CFG-TMODE-HEIGHT | 高度(cm単位) |
| 高度(1mm,0.1mm部分) | CFG-TMODE-HEIGHT_HP | 高度(0.1mm単位) |
緯度経度の小数点以下8,9桁部分、高度の1mm,0.1mm部分は必要ない場合は設定しなくても構いません。
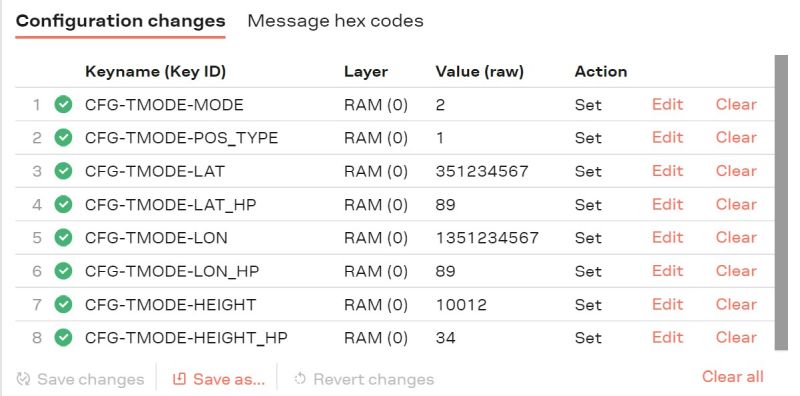
設定例
例として、緯度35.123456789度、経度135.123456789度、高度100.1234mの場合の設定内容は次のようになります。
緑のチェックマークはSendボタンを押して正常に設定できると表示されます。
出力データの制限
基準局として動作させる場合、通常のNMEAセンテンス等が出力されるとデータ量が多くなり、配信サーバによっては接続できなくなる場合があります。
そのため、RTCM以外のプロトコルのデータは出力しないように設定して下さい。
設定項目:CFG-UART1OUTPROT (UART1の部分は使っているインターフェースにより変更)
設定内容:UBX=False NMEA=False RTCM3X=True
基準局データの配信
上記の手順で基本的な設定ができますが、通常は基準局と移動局は別の場所にありますので、基準局のデータを無線で配信する必要があります。
無線の形式は色々ありますが、基準局のデータをインターネットで配信し、移動局はモバイルルータ経由で基準局データを受信するのが一つの方法です。
インターネットで配信する場合、配信用サーバが必要ですが、無料で利用できるサーバとして、RTK2goというサイトがあります。
日本国内限定では弊社が運営するgeortkというサイトもありますのでご利用下さい。
基準局データを配信するサーバはNTRIPキャスタと呼ばれていますが、以下NTRIPキャスタを使って配信する方法を説明します。
1)データ転送プログラム STRSVR のインストール
基準局用のZED-X20Pからのデータを配信用サーバにアップロードするためのプログラムとして、STRSVRと言うプログラムを利用します。
このプログラムは東京海洋大学の高須知二氏が作成されたRTK用ライブラリRTKLIBに格納されているプログラムで、次の手順でインストールします。
RTKLIB2.4.3のページで、Clone or download > Download ZIP とクリックし、ZIPファイルをダウンロードし、解凍します。
binフォルダにライブラリの各種プログラムが格納されていますので、その中のstrsvr.exeを使用します。
特にインストール作業は必要なく、strsvr.exeをダブルクリックすれば起動できます。
起動すると次の画面が表示されます。
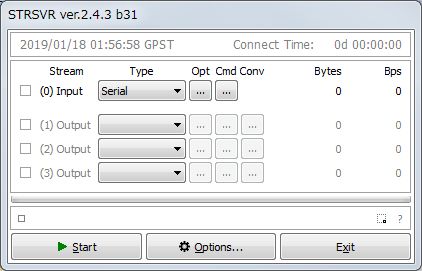
2)STRSVR の設定
STRSVRの画面で、InputとOutputを次のように設定します。
(0)Input
Type:Serialを選択
Opt: Optの下の...のボタンを押すと次の画面が表示されます。
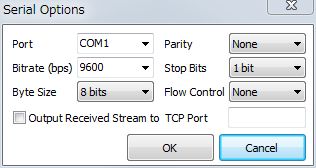
この画面で、Portは基準局用ZED-X20Pのポート番号を選択します。Bitrate(bps)は設定した値を選択します。
(1)Output
Type: NTRIP Serverを選択
Opt: Optの下の...のボタンを押すと次の画面が表示されます。
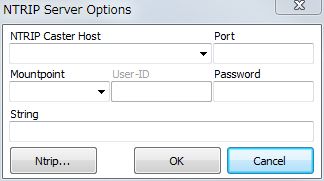
この画面で次の項目を設定します。
NTRIP Caster Host: rtk2go.com
Port: 2101
Mountpoint: マウントポイント名
Password: 指定したマウントポイントのパスワード
上記の設定が終わった後、STRSVRの画面にあるStartを押すとデータの配信が開始されます。
次の画面は配信している時の画面です。
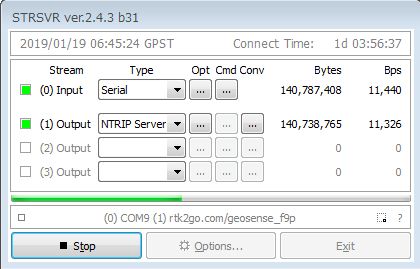
正常に配信されている時は、(0)Inputと(1)Outputの文字の左側の緑のマークがデータの受信、送信のタイミングで点滅します。
もし赤色の場合や点滅しない場合は設定を見直して下さい。
正常に配信されている事を確認後、ZED-X20Pなどの受信機で設定したマウントポイントにアクセスし、RTK測位ができるかご確認ください。
もし、RTK測位でFixしない場合、配信されているデータを確認する必要があります。
弊社の技術ブログに、確認用のPythonのプログラム「NTRIPモニタ」がありますのでご利用下さい。
6.ファームウェアの更新
最新のファームウェアはu-bloxのサイト「ZED-X20P module」を開いて、「Firmware Update」の項目からダウンロードできます。
ダウンロード後、u-center2を使ってファームウェアの更新を行ないますが、使用するインターフェースはUART1をお使い下さい。
ZED-X20P自身が持っているUSBインターフェースで更新できないか色々試しましたが、弊社では成功していません。
更新を行なうにはu-center2のメニューバーのTools and Servicesアイコンをクリックし、次にFirmware Updateをクリックすると、次の更新画面が表示されます。
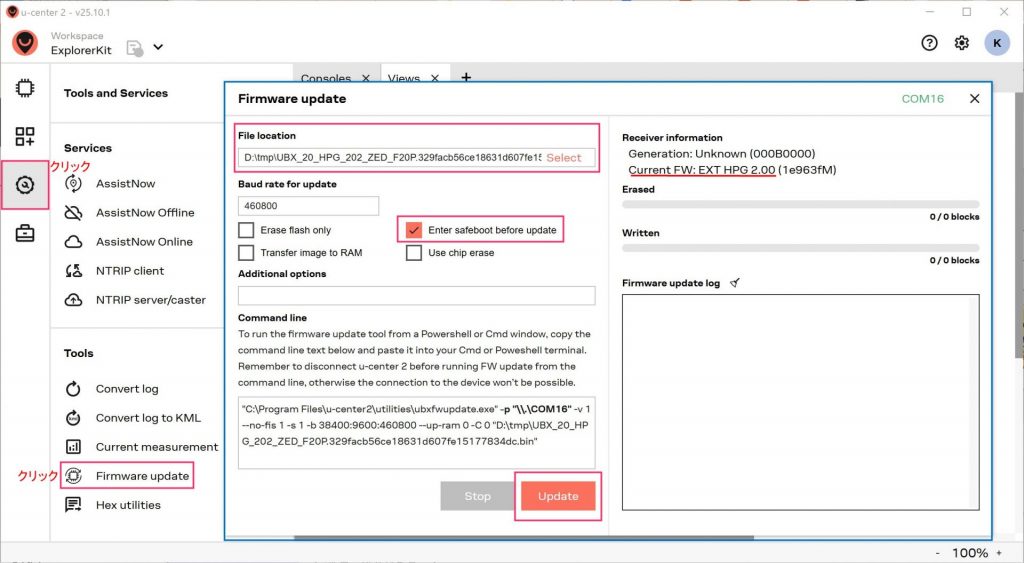
Firmware UpdateのウィンドウのFile locationでダウンロードしたファームウェアを指定します。
ファームウェアの名称には"HPG_202"の形式でバージョン番号が記載されています。
この例ではバージョンはHPG2.02ですが、Current FW:に表示されている現在のバージョンではなく、希望のバージョンである事を確認します。
オプションのEnter safeboot before updateを有効にした後、updateボタンを押します。
更新が始まると、進行状況が表示され、完了すると次の画面となります。
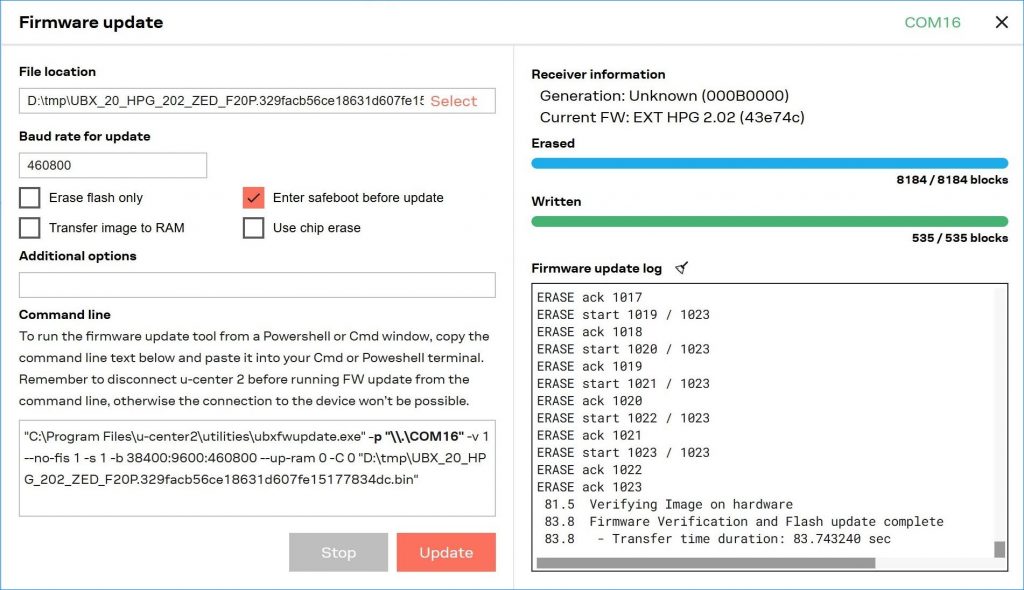
ログの画面に"Firmware Verification and Flash update complete"と表示されている事と、Current FW:のバージョンが希望のバージョンになっている事を確認します。
7.参考資料
「u-center 2 マニュアル」
「ZED-X20P Interface description」
「ZED-X20P テストレポート」
「X20PX1使用説明書」
以上