
u-bloxのZED-F9Pが発売され、従来は100万円単位だったRTK受信機が数万円で入手できるようになりました。
RTK受信機が安価になった事で、2台の受信機を使ってGPSコンパス機能を実現し、高精度の位置と方向を利用した応用も可能となりました。
その応用例として、盲人用のナビゲーション装置が考えられます。
地図上で歩行ルートを決め、その座標値を装置に入力しておき、そのルートに沿って歩くように音でガイドする装置です。
今回、弊社のRTKシステム開発用モジュールM5F9Pを2台、M5Stackに装着して、予備的な実験を行いました。
次の画像はその装置一式で、帽子には2本のヘリカルアンテナを付けています。左奥にあるのはモバイルルータとモバイルバッテリです。スマホのテザリングを使えば、モバイルルータは不要です。

コースは住宅街の道路で、道路の端から約1mの直線で距離は50m程度です。

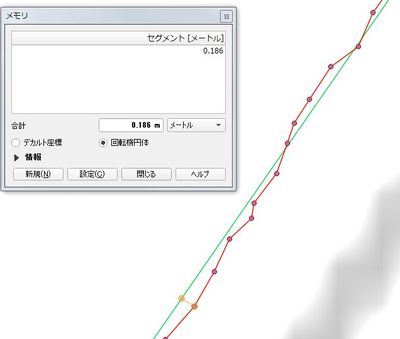
次の地図の緑の線が設定した直線コースです。
歩行開始地点で北を向いた後、目をつぶって、装置が出す音に従って向きを変えて歩きました。
その歩いた軌跡が赤茶色の線です。
目をつぶって歩いたとは思えないほど、真っ直ぐに歩く事ができています。

アルゴリズムは単純で、
今いる場所から想定ルートのへの垂線の足を求め、
垂線の長さに応じて目標点を決め、
その方位角に誘導します。
今向いている方向より左なら低音(D3)、右なら高音(G5)がなるようになっています。
垂線の長さと目標点の関係は次のとおりです。
20cm未満:垂線の足から2m先の点
40cm未満:垂線の足から1m先の点
70cm未満:垂線の足から50cm先の点
70cm以上:垂線の足
テストする前は、色々パラメータを調整しないと蛇行してしまうだろうと思っていたのですが、何も調整しなくても問題無いレベルで真っ直ぐに歩く事ができました。
次の図はコースから最も離れた点までの距離を測定したものですが、約19cmです。
歩行には少し慣れが必要で、音が高い時には右、低い時には左に方向を変えるのを間違わずに行わねばなりません。そのため、歩行速度は今回の実験では1.5km/h程度でした。
速度に関しては、音でなく音声や振動でガイドするなど改良すればもっと早く歩けるようになると思われます。
今回の実験のために要した日数は2日程度で、これは「RTK受信機 ZED-F9P on M5Stackの試作(その3)」で作成したプログラムに少し機能追加するだけだったからですが、意外にも簡単にできてしまったという感想です。
それは、2台のアンテナ、受信機を使った方位測定が良かったと言えますが、それはまた、RTKという測位方法の精度がcm単位であり、その当然の結果とも言えるかと思います。
今まで、盲人用のナビゲーションでは多くの開発事例がありますが、精度が大きな問題でした。
その問題がZED-F9Pの登場で、Fixする場所という限定的ではありますが、解決されたと言えそうです。
最後に、ソースコードは公開しますが、危険性があるので、連絡を頂いた方にのみ公開致します。
ご希望の方は弊社ホームページの問い合せ欄からご連絡下さい。