GPS精度分析ツール GPS Position Analyzer
GPS/GNSS受信機の測位精度はCEPや2DRMSで表示されますが、その計算ツールを作成しました。
アンテナは静止しているとして、NMEA形式のログファイルを読み込み、平均値等の統計情報と、時間毎の推移が分かるように変位マップを色分けし、また頻度分布を3D表示します。
次の画面は、ZED-F9Pの24時間分のログを表示したものです。
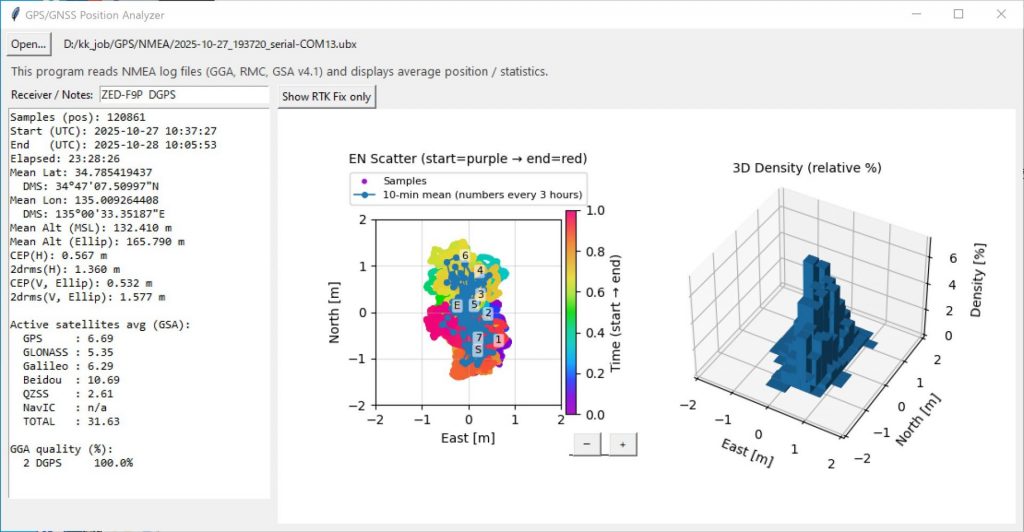
CEPは0.567mで、データシートにはDGPSのCEPは1.0mと記載されていますので、精度内である事が分かります。
衛星数の平均は31.63で、各衛星毎の平均も表示されていますが、NMEAのバージョンが4.1未満だと明細は表示されず、合計のみとなります。
中央の分布図の色分けは、測定開始が紫色、終了が赤で、途中は色相グラデーションで表示しています。
このDGPS測位では、測定された位置は、均等に分布しているのでなく、時間と共にかたまりとして移動しているのが分かります。
青の点と線は10分間毎の平均位置を示しています。Sが開始、Eが終了時点で、その間、3時間毎に番号がふってあります。
右側の3D表示は、分布範囲を縦横10分の1に区切って、その細分範囲毎の頻度を%表示したものです。
3D表示はマウスで回転できますが、24時間分のログだとスムーズには動きません。
+ーのボタンを押すとグラフの表示スケールが拡大縮小します。
プログラム言語はPythonで、ChatGPTにコーディングしてもらいました。
プログラムはgps_pos_analyzer.pyをダウンロードし、ChatGPT等でソースの安全性を確認した後、
python gps_pos_analyzer.py
を実行して下さい。Pythonはバージョン3以上が必要です。
GPSのログファイルはNMEA形式で、GGA,RMC,GSAセンテンスが必要です。
起動後、Openボタンを押し、ファイルの選択画面で表示するログファイルを指定して下さい。