
ZED-X20Pテストレポートその2(新FW HPG2.10に関して)
ZED-X20Pのファームウェアが更新され、HPG2.10が使用できるようになりました。
新ファームウェア及びリリースノートは
ZED-X20P module / Documentation & resources
からダウンロード可能です。
変更点
HPG2.02からの変更点は次のとおりです。(リリースノートをChatGPTにより和訳)
電離層推定改善
RTCM利用者向けに、20〜100kmの長基線用途を対象とした電離層推定を追加。
高電離層活動時でも ambiguity fix 時間を短縮し、誤FIXを減少。
SPARTN改善
ZED-F20P向け HPG 2.03 相当のSPARTN改善を導入。
Galileo HAS対応
Galileo High Accuracy Service (HAS) Phase 1 Service Level 1 PPP補強サービスをサポート。
RTK Float解生成が可能。
ジャミング・スプーフィング対策
JammerTest 2025 の結果に合わせ性能向上。
少なくとも1周波数帯が正常であれば、大きな位置誤差を避けつつ測位継続を目指す。
GLONASS geo-blocking
制裁対象国での利用抑止のため、一部地域(ロシア含む)でGLONASS信号を無効化。
Moving Base対応
別のX20P受信機と組み合わせ、ヘディングベクトル出力可能。
NEO-D9C対応
QZSS CLAS補強を利用したセンチメートル級測位をサポート。
NEO-D9S対応
SPARTN補正サービスを含むL-band raw data受信対応。
RTCM 1006対応
RTCM 1006 メッセージ対応追加。
その他
- SPARTN向け電離層モデル改善
- ambiguity resolution 改善
- scintillation環境での性能改善
- QZSS L1C/B対応
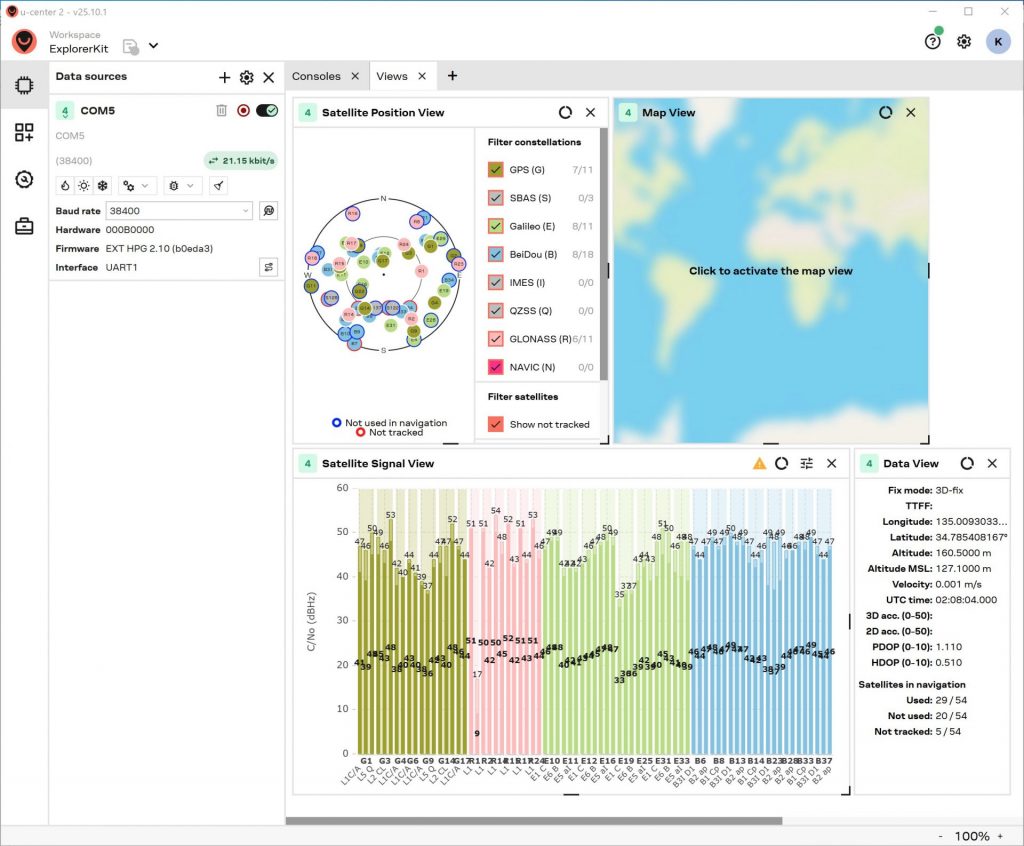
GLONASS対応
今までGLONASSが受信できなかったのは、地域により受信を制限する機構が実装されていなかったためのようです。
幸い日本は制限区域ではないようで、下記のように正常に受信できました。
Moving base対応
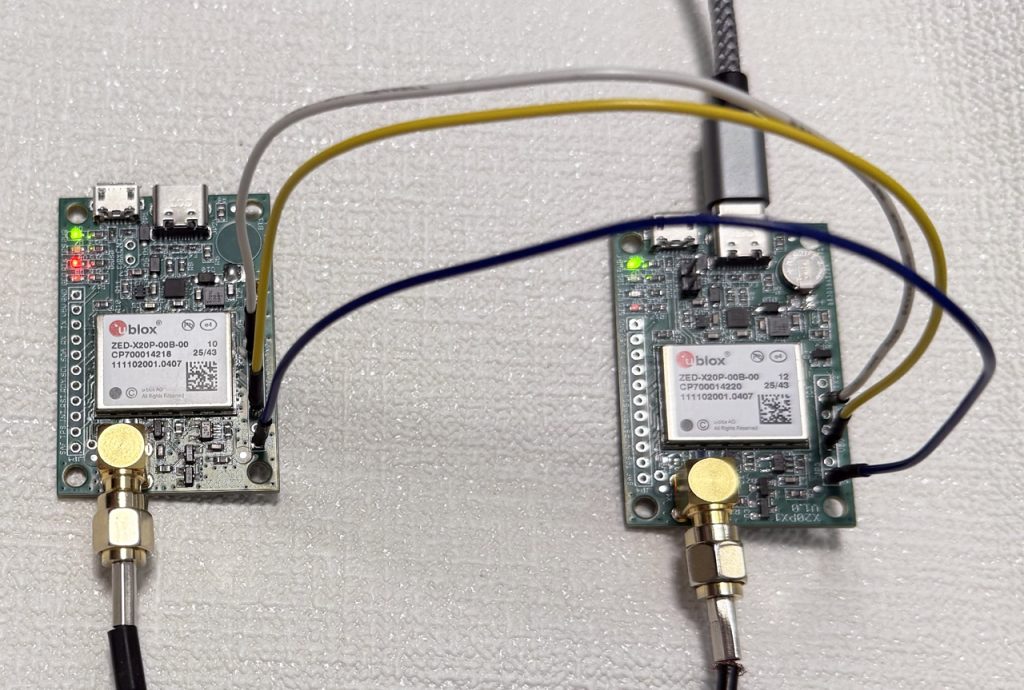
Moving base対応をテストするため、X20PX1を2台用意し、UART2を介して基準局データを移動局の基板に送り込むようにしました。
2台のアンテナは約4mほど離れて設置してあります。
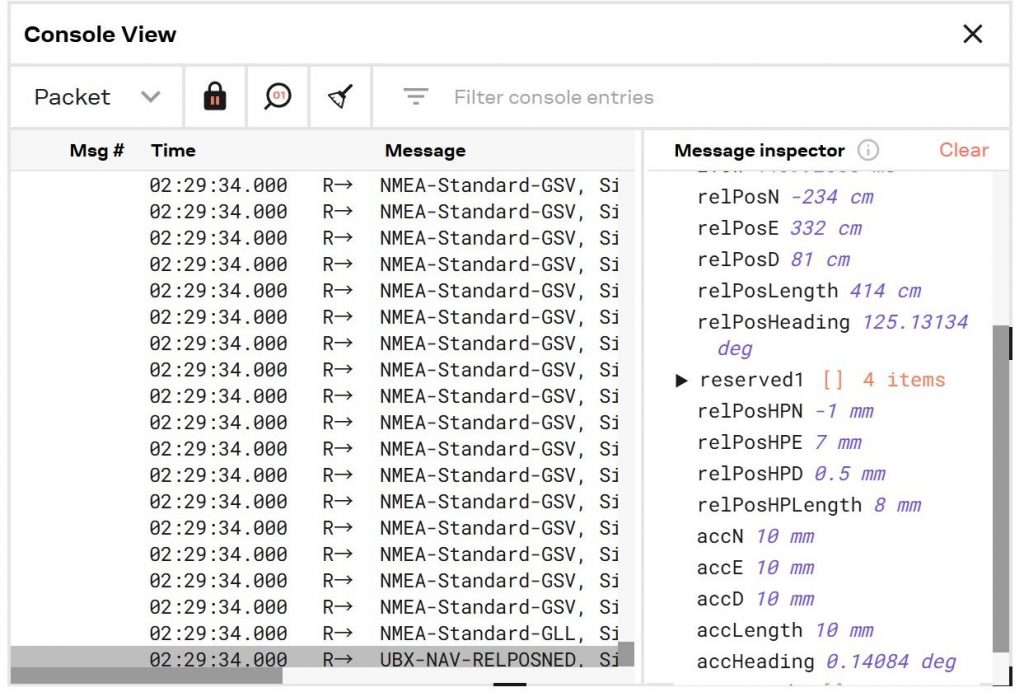
次の画面はMoving base測位の結果で、相対位置が正常に表示されています。
NEO-D9Cを使ったCLAS測位
ZED-X20P単独でのCLAS測位はまだ先になりそうで、今回はNEO-D9Cを使ったCLAS測位が可能となりました。
そのテストのため、X20PX1とD9CX1を組み合わせ、さらに比較のため、同時にF9PX1+D9CX1の組み合わせでも受信しました。
アンテナからの信号はスプリッタを通して2組に入力しています。

受信は24時間行ないましたが、そのログを「GPS精度分析ツール GPS Position Analyzer」に読み込みました。
その結果は次のとおりです。
グラフは上段がZED-X20P、下段がZED-F9Pです。
| ZED-X20P | ZED-F9P | |
| 水平誤差(2drms) | 42mm | 91mm |
| 垂直誤差(2drms) | 82mm | 177mm |
| Fix率 | 99.9% | 99.7% |
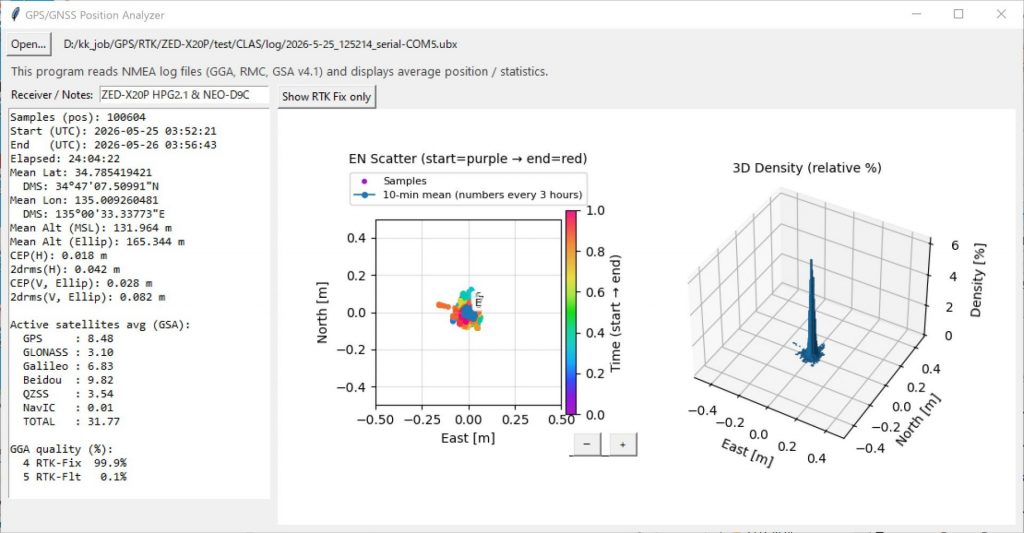
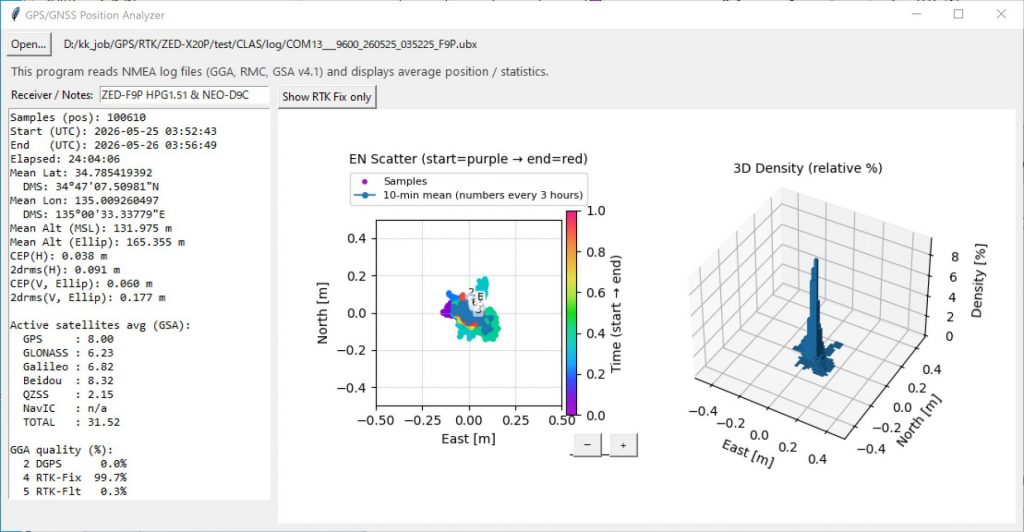
中央のグラフEN Scatterを見ると、ZED-F9Pでは時間により分布の範囲が移動していて、電離層等の誤差成分の修正が不十分な事が分かります。
一方、ZED-X20Pでは中央に分布して、誤差成分の除去がうまく行っています。
ZED-X20PではL5バンドが受信できるのでその効果かもしれません。
